

 Linkedin
Linkedin
 Google +
Google +
This servo winch, features ahigh-performance Delta servo motor as its core drive. Equipped with an automatic rope arranger and rope pressing device, it ensures efficient payout and stable retrieval of the rope, effectively preventing tangling even under slack conditions. The integrated system includes a length-measuring encoder and force sensor to monitor rope length, speed, and tension in real time. Critical data is fed back to the PLC control system, enabling intelligent operation and precise process control. This device is widely used in high-precision experimental applications such as humanoid robot testing fixtures.
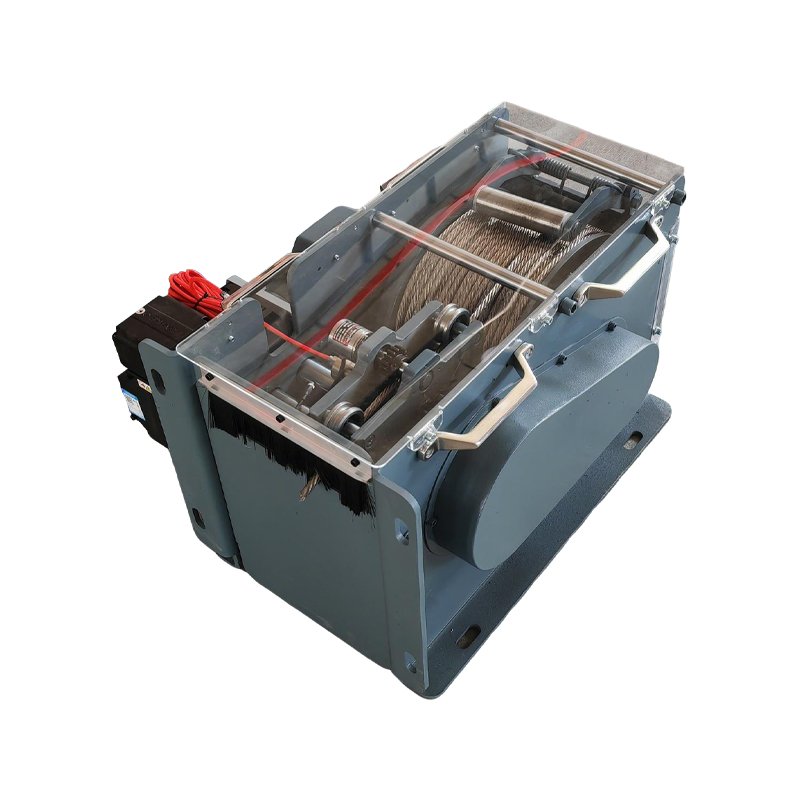
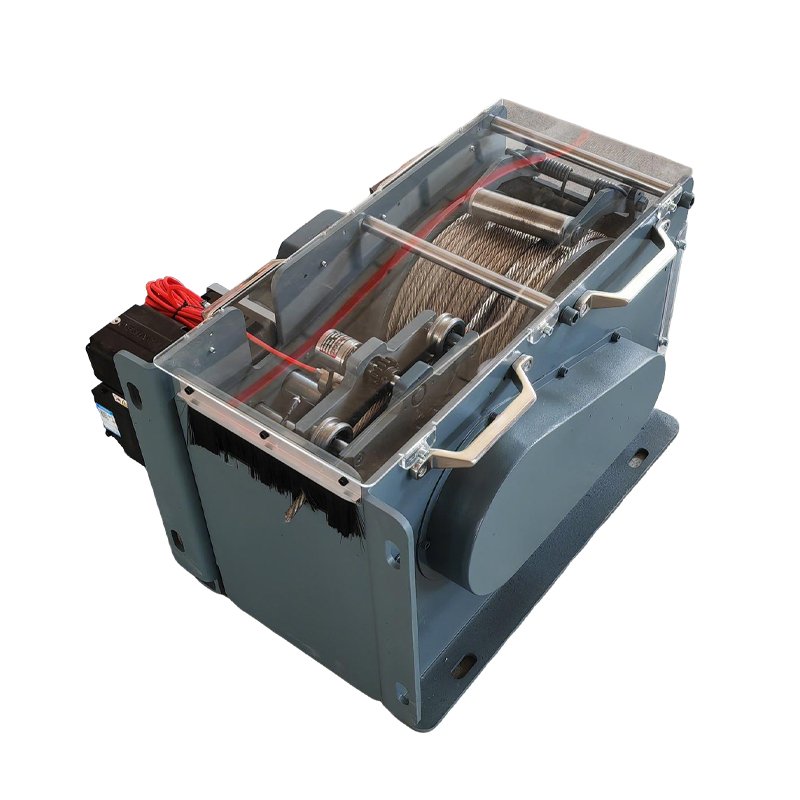

Intelligent Industrial Servo Winch System (Closed-Loop Control)
-
 1")
Technical & Design Advantages
- 🚀 Precision Servo Drive System
- At the heart of the unit is a high-performance Delta winch servo motor. Unlike standard AC motors, this system offers fast response milliseconds latency and high precision, ensuring ultra-smooth rope payout and retrieval without jitter.
- 🧠 Intelligent PLC Control & Feedback
- This is a fully programmable winch servo system. Integrated with a length-measuring encoder and force sensor, it feeds critical data (speed, tension, position) back to your PLC control system in real-time, enabling complex automation logic.
- 🔄 Advanced Rope Management (Anti-Tangle)
- Equipped with an Automatic Rope Arranger and Pressing Device. This guarantees orderly spooling and prevents tangling or knotting, even when the rope is under slack conditions (zero tension), significantly enhancing system stability.
Specifications
Feature Specification Details Product Name Industrial Servo Winch / Precision Electric Hoist Rated Load 200 lbs, 1000 lbs, 5000 lbs, up to 12,000 lbs (Customizable) Voltage 220V Single-Phase / 380V 3-Phase (AC Powered) Motor Type Delta Servo Motor (High Torque & Speed) Sensors Encoder (Position/Speed) + Load Cell (Tension) Rope System Automatic Arranger + Pressing Mechanism Control PLC Compatible (Modbus/EtherCAT/Analog) Model:500kg Rated pulling force :500kg Rope diameter:8mm (Stainless steel) Motor power:1.3kw Self-weight:115kg Drum speed :12.5rpm Average rope speed:5m/min Model A(Length) B(Width) C(Height) 500kg 581mm 600mm 414mm Target Applications
- 🤖 Humanoid Robot Testing Fixtures
- Provides dynamic gravity compensation and fall protection. The high speed electric winch response protects expensive robot prototypes during walking or balancing tests.
- 🎭 Stage Machinery & Automation
- Perfect for flying scenery or lighting where noise control and positional accuracy (mm-level) are critical.
- 🏭 Precision Assembly & Material Handling
- Used in aerospace or automotive lines for material transport and positioning, where delicate components require monitored tension to prevent damage.
Custom Development
"Tailored to Your Testing Protocols" We understand that standard winches cannot meet the demands of laboratory or precision manufacturing.
- 🚀 Precision Servo Drive System
-
get a quote
Related products
-

Self-Roping Winch - Grooved Drum, Reciprocating Lead Screw Rope Arrangement, IP56 Dust & Water Protection
-

Self-Roping Winch - Grooved Drum, Mechanical Brake Limit, Low-Noise & High-Efficiency Speed Regulation
-

Self-Roping Winch - Precise Length Control, Orderly Multi-Layer Rope Winding
-

Self-Roping Industrial Winch - Double Braking Protection, Adapted to High Salinity and Humidity for Deep Sea Operations
-

Self-Roping Winch - Hardened Tooth Surface Reducer, Double Braking, Special for High-Lift Hoisting
-

Stainless Steel Inline Winch - Rust & Corrosion Resistant, Height Limitation, Customizable
-

Inline Industrial Winch - Grooved Drum, Continuous Operation, Customizable
-

Dual Rope Synchronous Electric Winch - L-type Single Drum, Variable Frequency Speed Regulation, Electromagnetic Braking